焊接工藝的困境
焊接是一種通過加熱、加壓或兩者并用,使兩個或多個工件在原子或分子間結合而形成永久性連接的工藝,它被譽為“工業的裁縫”,雖然看似是簡單的金屬連接,但其背后蘊含的技術深度和對現代工業的重要性,遠超一般人的想象。具體來說,通過焊接工藝能夠將分離的金屬部件真正地“融合”成一個連續、整體的結構,實現結構一體性與完整性;其次,允許工程師將不同形狀、尺寸、甚至不同材質的金屬材料組合在一起,制造出極其復雜的結構件,從而大幅提高材料利用率與設計自由度;最后,焊接工藝還能保證連接處的密封性,相較于鉚接方式有著更輕量化的特點。但在制造業的焊接領域普遍面臨三大難題:
- “人”的難題:焊接工作環境艱苦(高溫、煙塵、弧光輻射),對體力和技能要求高,年輕一代愿意從事該行業的意愿急劇下降,導致全球性的“熟練焊工荒”。并且,一名高級焊工的培養周期長、薪酬高,且管理成本不斷上升。企業面臨“招工難、留人難、用人貴”的困境。
- “市場”的難題:過去大規模、標準化生產的時代正在向個性化定制、小批量、快迭代的時代轉變。市場要求生產線能快速響應不同產品的制造需求。而傳統工業機器人是為“大規模生產”而生的,它編程復雜、調試周期長、產線僵化。為了焊接一個新工件而重新編程、調整產線,可能花費數天甚至數周,在經濟上完全不可行。
- “成本與效率”的難題:傳統工業機器人系統初始投資巨大,不僅包括機器人本身,還包括昂貴的安全圍欄、系統集成、編程調試等費用,動輒上百萬元,讓廣大中小企業望而卻步。它需要專業的機器人工程師和程序員來操作維護,對企業的技術儲備要求高。

在上述宏觀背景下,焊接協作機器人應運而生,精準地瞄準了傳統焊接模式的兩個極端所暴露出的問題:傳統手工焊接的局限性和傳統焊接機器人的“剛性”與“孤立”。
焊接協作機器人
焊接協作機器人可以理解為一位 “不知疲倦、精度極高且能與人類親密無間的智能焊工”,通常由如下幾部分組成:
- 協作機器人本體:通常以六軸協作機械臂為主,內部集成了力矩傳感器,多軸特征使其能靈活運動,確保以精準的角度或姿態到達目標位置。
- 傳感與視覺系統:機器人的“大腦”,負責處理所有運動控制、邏輯運算和與外圍設備(焊機、傳感器)的通信。以圖形化編程界面取代復雜的代碼,通過圖標和菜單進行編程。此外,允許操作者直接用手拖動機器人手臂來記錄路徑,支持拖動示教功能。
- 機器人控制器與軟件:這是系統的“眼睛”。通常在焊槍前方發射一束激光條紋,通過攝像頭捕捉工件表面的三維輪廓,從而實時定位焊縫的準確位置,并補償由于工件裝配、公差或熱變形引起的偏差。
- 焊接系統:作為焊接工作的末端執行器,通常由焊槍/焊炬、防護罩/冷卻系統、焊接電源以及送絲機構組成。

焊接協作機器人的出現,正在從多個層面重塑焊接行業。
- 破解“用工荒”與成本難題:它能直接替代工人在有毒、高溫、易燃易爆的惡劣環境下工作,有效保障職業健康。同時,它將焊工從重復性勞動中解放出來,使其轉型為機器人的“管理員”與“指揮官”,降低了對操作者焊接技術的要求,緩解了熟練焊工短缺的壓力。
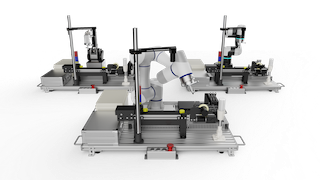
- 推動生產模式走向“柔性化”:傳統自動化生產線很難適應“多品種、小批量”的訂單趨勢。協作機器人憑借快速編程、靈活部署的優勢,可以輕松地在同一條生產線上焊接不同型號的產品,真正實現了 “今日焊鋼架,明日焊齒輪” 的柔性生產,特別適合當前個性化定制的市場需求。
- 實現“提質增效”與“降本”:機器人可以24小時不間斷穩定工作,將焊接速度提升至人工的3倍,并憑借高于人手的穩定性和實時質量控制,將一次合格率提升至接近100%,顯著提升了產能。其模塊化設計和開放的生態,也大幅降低了自動化系統的部署和二次開發成本。
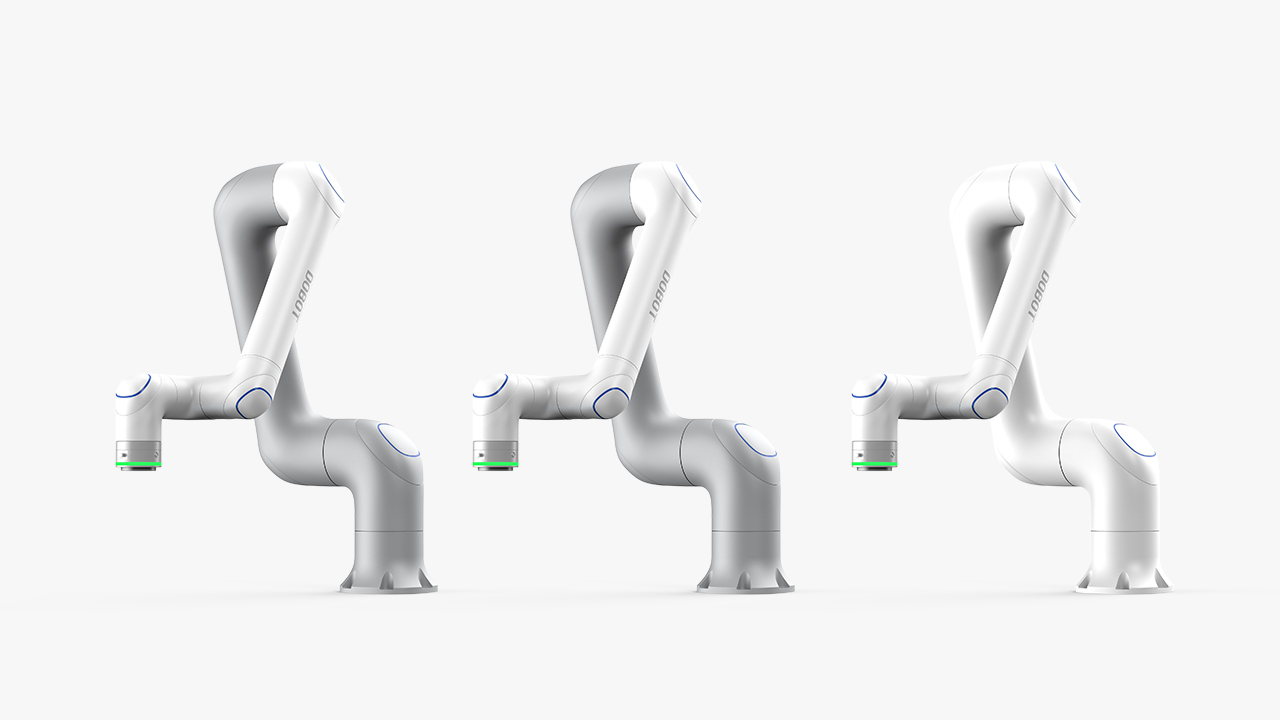
越疆CRA系列協作機器人
越疆協作機器人CRA系列能在焊接中有出色表現,主要得益于以下幾個方面:
- 高精度與穩定性:機器人重復定位精度可達±0.02mm,并能在復雜焊接中保持±0.3mm的絕對精度。這保證了焊縫的高一致性和一次成型合格率。
- 智能焊接工藝包:這是越疆焊接方案的"大腦",封裝了多種專業焊接工藝。主要功能包括:
多種擺焊模式:支持月牙形、正弦形、螺旋形等,適應不同焊縫需求。
智能尋位與跟蹤:通過激光或接觸傳感,自動補償工件裝配偏差和熱變形。
多層多道焊:用于中厚板焊接,確保結構強度。
斷點續焊:焊接意外中斷時,能自動返回并搭接續焊,保證焊縫完整性。
- 卓越的路徑精度與防抖:機器人搭載振動抑制算法,在高速運動停止時能將殘余抖動控制在0.4mm以內,確保復雜軌跡焊接的平穩性。
- 靈活部署與快速編程:通過 "拖動示教" 和圖形化編程界面,普通工人也能快速設置焊接路徑,大幅降低了對專業編程人員的依賴。并且機器人本體輕巧,支持磁力底座吸附、吊裝或安裝在導軌上等多種安裝方式,適應狹小空間。
- 安全保障與人機協作:機器人具備5級碰撞檢測功能和安全電子皮膚(部分型號),能在15厘米感知范圍內實現碰撞前停止,無需安全圍欄即可與人協同作業

總的來說,越疆協作機器人通過其±0.02mm的重復定位精度、豐富的智能焊接工藝包以及靈活的部署方式,在焊接領域,特別是在需要高精度、高柔性以及應對復雜工況的場景下,表現出色。
來到實戰場景,越疆協作機器人的焊接方案已在多個行業成功應用:
- 船舶制造:使用磁力底座吸附在船體上,實現360°全位置焊接(包括仰焊、立焊),將焊接工期縮短了70%。
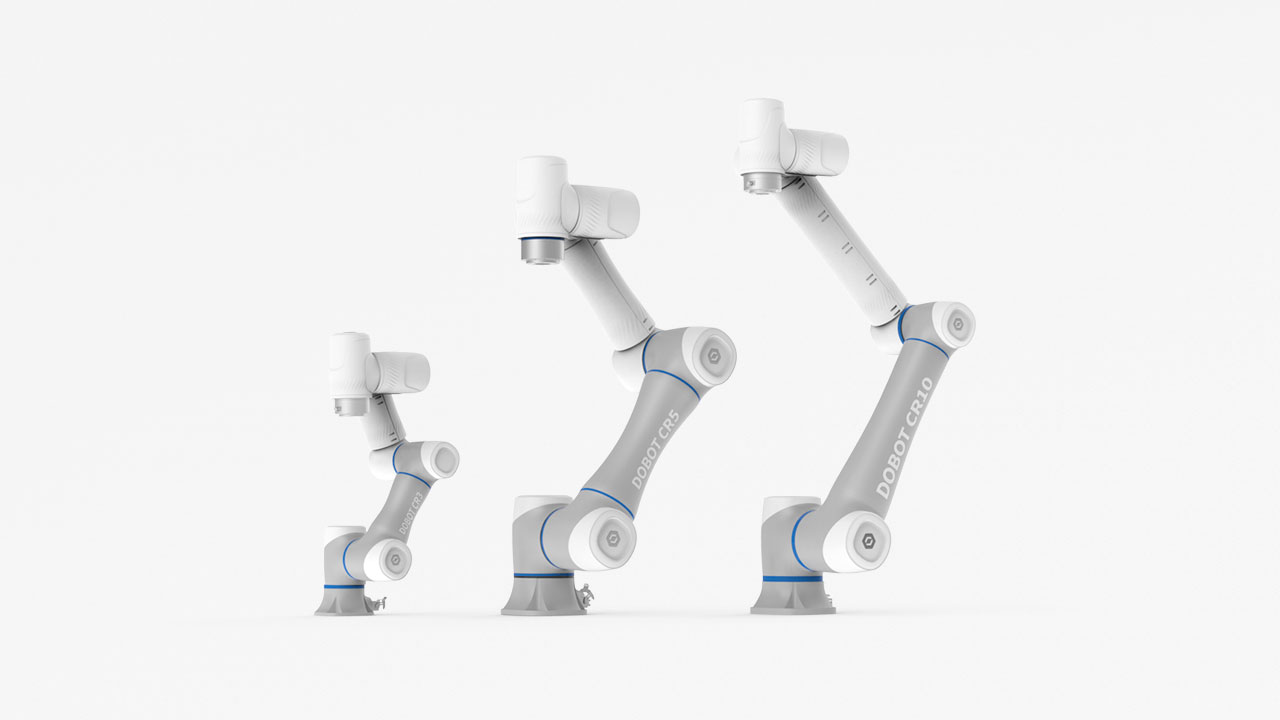
- 大型鋼結構:10臺CR10(CRA系列上一代)機器人可在導軌上同步作業,使整線產能提升200%,焊接速度是人工的3倍,一次合格率接近100%。
- 橋梁建設:便攜式機器人在松花江特大橋、京哈鐵路橋等國家重點工程中,于數十米高空進行橋址焊接,保障了人員安全與質量。
- 汽車與精密制造:在汽車制造中,用于車門、底盤等部件焊接,振動抑制算法保障了精密部件的一致性。
自動化焊接只是越疆CRA系列協作機器人多種解決方案之一,除了協作機器人主流的應用:搬運、碼垛以及分揀上下料外,還支持涂膠應用、視覺檢測以及裝配等制造業應用,可謂是制造業中的多面手。
總結一下,焊接協作機器人的誕生,是為了在“人”與“傳統機器”之間,找到一個完美的平衡點,以應對制造業柔性化、人力短缺和成本控制的新時代挑戰。焊接協作機器人本質上是一個生產力工具的革命,它改變了生產的組織方式,讓自動化變得民主化、普及化,最終推動了整個焊接行業乃至制造業的轉型升級。










 汽車制造
汽車制造
 3C電子
3C電子
 金屬加工
金屬加工
 新零售
新零售
 食品飲料
食品飲料
 化工
化工
 醫療手術
醫療手術
 半導體
半導體
 科研
科研
 教育
教育
 自動化焊接
自動化焊接
 碼垛
碼垛
 上下料
上下料
 無序分揀
無序分揀
.svg) 點涂膠
點涂膠
 視覺檢測
視覺檢測
 裝配
裝配
 搬運
搬運
 PCB 插件
PCB 插件
 打磨拋光
打磨拋光
 螺絲鎖付
螺絲鎖付


